


Bilens förmåga att förstå sin omgivning uppnås genom många olika system och typer av sensorer. Bilens tolkning av de data den samlar in bidrar till att påverka dess beteende, särskilt i fråga om förarstödsfunktioner.
| Kameror | Kameror fungerar på samma sätt som det mänskliga ögat. Det de registrerar används för olika ändamål, vilket beror på kameran. Exempelvis, den övre framåtriktade kameran hjälper bilen att identifiera exempelvis trafikskyltar och vägmarkeringar, medan det som den bakre parkeringskameran registrerar visas på centerdisplayen. |
| Främre radar | Radarn använder radiovågor för att samla in information om bilens omgivning. Den kan identifiera avståndet till föremål och vissa faktorer i deras rörelser. Denna information är nödvändig för många funktioner i bilen. |
| Parkeringssensorer med ultraljud | Dessa sensorer använder ljudvågor för att detektera objekt som befinner sig relativt nära. De arbetar genom att sända ut ultraljudspulser som reflekteras tillbaka till sensorna när de träffar på ett objekt. |
Hur systemen arbetar tillsammans
De olika typerna av detektering kompletterar varandra. De används ibland var för sig och ibland tillsammans.
Viktigt
Allmänna begränsningar för detektering och identifiering
- Bilen kan inte alltid hantera oförutsägbara eller märkliga situationer. När bilen har svårt att identifiera miljön eller trafiksituationen korrekt påverkas noggrannheten i dess respons.
- Skador på bilen kan påverka detekteringen och funktioner som använder denna. Bilen kan identifiera många fel, men vissa fel kanske inte är möjliga att identifiera själv. Därför är det viktigt att se till att bilen är i gott skick och fungerar som den ska. Kontakta Polestar support om du misstänker att det finns ett fel eller om du upptäcker skador på bilen.
- Begränsande faktorer och förhållanden kan sammanfalla, och gör det ofta. De kan förenas och interagera på sätt som leder till en felaktig respons från bilen.
Begränsningar för hinderdetektering
Hinderdetektering hjälper bilen att identifiera vissa stillastående och rörliga objekt. Det kan vara andra trafikanter, såsom fotgängare eller andra fordon, djur, hinder eller andra föremål. Om de befinner sig i eller nära bilens körbana kan de utgöra en kollisionsrisk. Beroende på omständigheterna kan bilen varna eller ingripa om objektet identifieras korrekt. För alla typer av objekt som bilen kan identifiera finns det många faktorer som kan förhindra en korrekt identifiering. Exempel på begränsande faktorer, situationer och händelser inkluderar:
- Närliggande, överlappande eller delvis blockerade objekt och trafikanter.
- Objekt och trafikanter som smälter in i bakgrunden.
- Objekt och trafikanter som rör sig eller accelererar särskilt snabbt.
- Ovanliga fordon, såsom liggcyklar, skördetröskor eller släpvagnar med last som har en ovanlig form.
- Cyklar av en annan typ eller storlek jämfört med en vanlig vuxencykel.
- Nya transportsätt.
- Kläder eller medhavda föremål som förändrar fotgängarens silhuett.
- Fotgängare kortare än 80 cm (32 tum).
- Hinder med vinklar som skapar en okänd silhuett.
- Storlek och hastighet hos djur. Katter och hundar är ofta för små för att kunna identifieras på ett tillförlitligt sätt.
OBS
Exempel på trafikdetektering
De följande exemplen med olika trafikscenarier kan hjälpa dig förstå vissa begränsningar i bilens detekteringssystem. Exempel från verkligheten är ofta mer komplexa än illustrativa 1 exempel i denna manual.
Utom synhåll och sen upptäckt
De olika detekteringszonerna runt bilen är statiska och har alla begränsad räckvidd och synfält. Om något kommer in i en detekteringszon i en ovanlig vinkel, i hög hastighet eller mycket nära din bil kan det orsaka en snabb respons. Detta minskar säkerhetsmarginalerna jämfört med en situation där en tidigare upptäckt var möjlig.
Viktigt
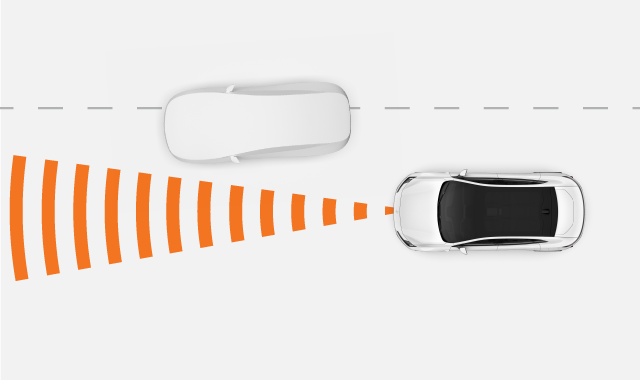
Placering i körfält och små fordon
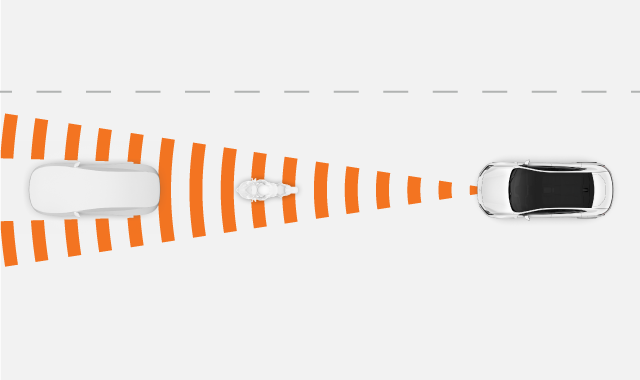
För framåtriktad detektering är mitten av körfältet bättre än dess ytterkanter. Fordon kan passera obemärkta om de inte befinner sig i mitten av körfältet. Detta kan hända med alla fordon, men risken är högre för små fordon, såsom motorcyklar. De tar upp en mindre del av körfältets bredd och kan röra sig mer inom körfältet. Var alltid extra uppmärksam på fordon som inte kör i mitten av körfältet.
Form, storlek och antal föremål
- Små föremål är svårare att identifiera.
- Ju fler föremål, desto svårare är det att identifiera enskilda föremål.
- Objekt som befinner sig nära varandra och överlappar varandra är svårare att identifiera.
- Föremål med avvikande form, såsom överhäng eller delar som sticker ut, är svårare att identifiera.
Förekomsten av ett stort fordon framför kan göra det svårt att identifiera ett mindre fordon, såsom en motorcykel.
Viktigt
Släpvagn framför
Jämfört med många andra fordon på vägarna är detekteringen av släpvagnar ofta mindre tillförlitlig på grund av deras form och höjd. Detta gäller i synnerhet smala och låga släpvagnar samt släpvagnar med mycket höga lastflak. Sådana släpvagnar har ofta inte tillräckligt stor yta på den höjd där de framåtriktade detekteringssystemen fokuserar.
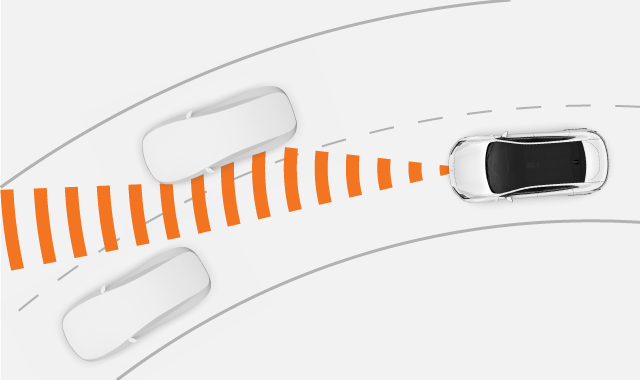
Väg och infrastruktur
Om vägen är kurvig kan det leda till att bilen misstolkar trafiksituationen. Den kan till exempel tappa bort ett fordon eller felidentifiera vilket körfält ett framförvarande fordon befinner sig i.
Viktigt
Väglag och ojämnheter
- Skarpa kurvor och ojämnheter i vägbanan kan tillfälligt skymma viktiga delar av bilens omgivning, såsom andra fordon eller vägmarkeringar.
- Väginfrastruktur som inte är standardiserad eller som är ovanlig kanske inte identifieras korrekt av bilen. Till exempel kan vägarbete eller trafikomläggningar leda till motstridiga eller flera uppsättningar vägmarkeringar.
- Slitna vägmarkeringar eller skyltar kanske inte identifieras korrekt.