


Ympäristön ja liikenteen havainnointi
Autosi kyky ymmärtää ympäristöään perustuu useisiin järjestelmiin ja eri tyyppisiin antureihin. Auton tulkinta sen keräämistä tiedoista auttaa ohjaamaan sen toimintaa, erityisesti kuljettajan tukitoimintojen osalta.
| Kamerat | Kamerat toimivat vastaavalla tavalla kuin ihmissilmä. Kaappauksia käytetään eri tarkoituksiin kamerasta riippuen. Esimerkiksi ylempi etukamera auttaa autoa tunnistamaan mm. liikennemerkit ja tiemerkinnät, kun taas takapysäköintikameran kuvaamat asiat näkyvät näytössä. |
| Tutkat | Tutkat käyttävät radioaaltoja kerätäkseen tietoa auton ympäristöstä. Ne voivat tunnistaa etäisyyden kohteisiin ja niiden liikkeen tiettyjä piirteitä. Nämä tiedot ovat välttämättömiä monien auton ominaisuuksien kannalta. |
| Ultraäänianturit | Nämä anturit käyttävät ääniaaltoja havaitakseen suhteellisen lähellä olevat kohteet. Ne toimivat lähettämällä ultraäänipulsseja, jotka voivat heijastua takaisin anturiin, kun ne osuvat kohteeseen. |
Miten järjestelmät toimivat yhdessä
Eri havaintotavat täydentävät toisiaan. Niitä käytetään joskus erikseen ja joskus yhdessä.
Tärkeää
Yleiset havaitsemisen ja tunnistuksen rajoitukset
- Auto ei aina selviydy yllättävistä tai oudoista tilanteista. Kun auton on vaikea hahmottaa ympäristöä tai liikennetilannetta oikein, sen reagoinnin tarkkuus heikkenee.
- Auton vaurioituminen voi vaikuttaa tunnistukseen ja sitä käyttäviin toimintoihin. Auto voi tunnistaa useat viat, mutta joidenkin vikojen tunnistaminen ei välttämättä ole mahdollista. Siksi on tärkeää varmistaa, että auto on hyvässä kunnossa ja että se toimii oikein. Ota yhteys Polestar support -tukeen, jos epäilet vikaa tai jos huomaat autossa vaurioita.
- Rajoittavat tekijät ja olosuhteet voivat esiintyä ja usein esiintyvätkin samanaikaisesti. Ne voivat yhdistyä ja toimia yhdessä tavalla, joka johtaa auton virheelliseen reaktioon.
Esteiden tunnistuksen rajoitukset
Esteiden tunnistus auttaa autoa tunnistamaan tietyt paikallaan olevat ja liikkuvat kohteet. Ne voivat olla muita tienkäyttäjiä, kuten jalankulkijoita tai muita ajoneuvoja, eläimiä, esteitä tai muita esineitä. Jos ne ovat auton kulkureitillä tai lähellä sitä, ne voivat aiheuttaa törmäysriskin. Olosuhteista riippuen auto voi varoittaa tai puuttua tilanteeseen, jos kohde tunnistetaan tarkasti. Kaikkien sellaisten kohteiden kohdalla, jotka auto voi tunnistaa, on monia tekijöitä, jotka voivat estää tarkan tunnistuksen. Esimerkkejä rajoittavista tekijöistä, tilanteista ja tapahtumista ovat:
- Lähekkäin olevat, päällekkäiset tai osittain peitetyt kohteet ja tienkäyttäjät.
- Kohteet ja tienkäyttäjät, jotka sulautuvat taustaan.
- Kohteet ja tienkäyttäjät, jotka liikkuvat tai kiihdyttävät erityisen nopeasti.
- Epätavalliset ajoneuvot, kuten makuupyörät, leikkuupuimurit tai perävaunut, joissa on epätavallisen muotoinen kuorma.
- Polkupyörät, jotka ovat erityyppisiä tai -kokoisia kuin tavalliset aikuisten polkupyörät.
- Uudet liikkumismuodot.
- Vaatteet tai kannettavat esineet, jotka muuttavat jalankulkijan siluettia.
- Jalankulkijat, jotka ovat lyhyempiä kuin 80 cm (32 tuumaa).
- Kohteet, jotka ovat sellaisessa kulmassa, että niiden siluetti jää tunnistamattomaksi.
- Eläinten koko ja nopeus. Kissat ja koirat ovat usein liian pieniä tunnistettavaksi luotettavasti.
Huomio
Esimerkkejä liikenteen havaitsemisesta
Esimerkit erilaisista liikennetilanteista voivat auttaa sinua ymmärtämään joitakin autosi tunnistusjärjestelmien rajoituksia. Todelliset tilanteet ovat usein monimutkaisempia kuin tässä käsikirjassa esitetyt havainnollistavat1esimerkit.
Näkökentän ulkopuoliset kohteet ja myöhäinen tunnistus
Autosi ympärillä olevat eri tunnistusalueet ovat staattisia, ja niillä on rajoitettu etäisyys ja näkökenttä. Jos jokin tulee tunnistusalueelle epätavallisessa kulmassa, suurella nopeudella tai hyvin lähellä autoa, se voi aiheuttaa nopean reaktion. Tämä pienentää turvamarginaalia verrattuna tilanteeseen, jossa havaitseminen olisi ollut mahdollista aikaisemmin.
Tärkeää
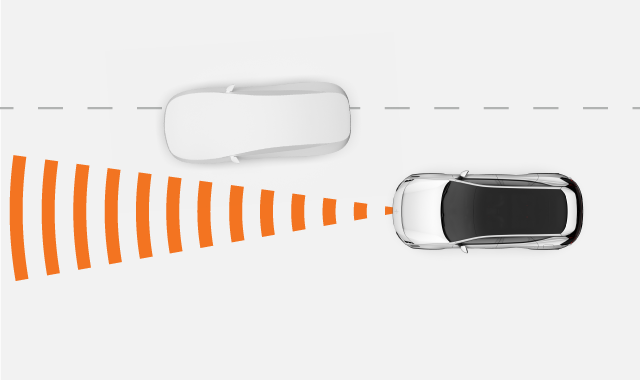
Sijainti kaistalla ja pienet ajoneuvot
Etutunnistuksen osalta kaistan keskiosa on suotuisampi kuin sen reunaosat. Ajoneuvot voivat jäädä havaitsematta, jos ne eivät ole kaistan keskellä. Vaikka näin voi tapahtua minkä tahansa ajoneuvon kohdalla, riski on suurempi pienten ajoneuvojen, kuten moottoripyörien, kohdalla. Ne vievät vähemmän kaistan leveydestä ja voivat liikkua enemmän kaistan sisällä. Kiinnitä aina erityistä huomiota ajoneuvoihin, jotka eivät aja keskellä kaistaa.
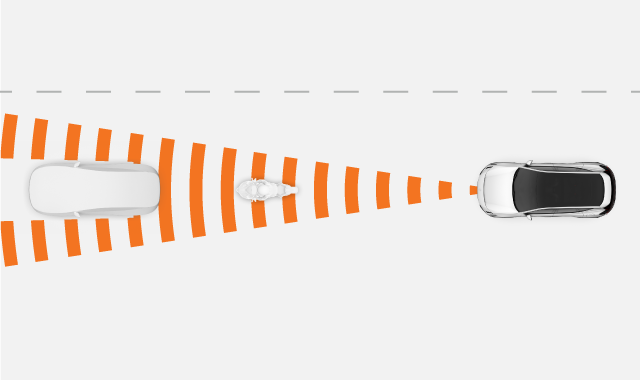
Kohteiden muoto, koko ja lukumäärä
- Pienten kohteiden tunnistaminen on vaikeampaa.
- Mitä enemmän kohteita on, sitä vaikeampaa on tunnistaa yksittäisiä kohteita.
- Lähellä toisiaan olevia, päällekkäisiä kohteita on vaikeampi tunnistaa.
- Epäyhtenäisen muotoisia kohteita, esimerkiksi kohteita, joissa on ulkonevia osia, on vaikeampi tunnistaa.
Edessä oleva suuri ajoneuvo voi vaikeuttaa pienemmän ajoneuvon, kuten moottoripyörän, tunnistamista.
Tärkeää
Perävaunu edessä
Perävaunujen tunnistaminen on moniin muihin tiellä liikkuviin ajoneuvoihin verrattuna usein vähemmän luotettavaa niiden muodon ja korkeuden vuoksi. Tämä koskee erityisesti kapeita perävaunuja, matalia perävaunuja ja perävaunuja, joissa on erittäin korkea kuormataso. Tämäntyyppisissä perävaunuissa ei useinkaan ole riittävästi pinta-alaa siinä korkeudessa, johon eteenpäin suuntautuvat tunnistusjärjestelmät keskittyvät.
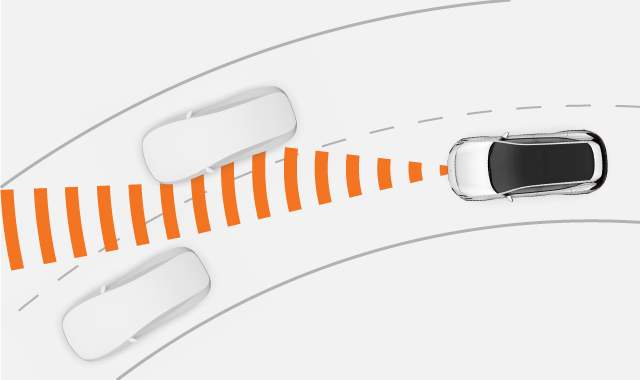
Tie ja infrastruktuuri
Tien mutkat voivat aiheuttaa sen, että auto tulkitsee liikennetilanteen väärin. Se voi esimerkiksi kadottaa ajoneuvon tai tunnistaa väärin, millä kaistalla edellä ajava ajoneuvo on.
Tärkeää
Tien kunto ja epäsäännöllisyys
- Jyrkät mutkat ja kuopat tiessä voivat hetkellisesti peittää auton ympäristön tärkeät osat, kuten muut ajoneuvot tai tiemerkinnät.
- Auto ei välttämättä tunnista oikein epätyypillistä tai epätavallista tieinfrastruktuuria. Esimerkiksi tietyöt tai liikennejärjestelyt voivat johtaa ristiriitaisiin tai useisiin tiemerkintöihin.
- Kuluneita tiemerkintöjä tai merkkejä ei välttämättä tunnisteta oikein.