어댑티브 크루즈 컨트롤*1
어댑티브 크루즈 컨트롤(ACC2)은 일정한 속도를 유지하고 앞차와의 사전 설정된 시간 간격을 유지할 수 있도록 도움을 줍니다.
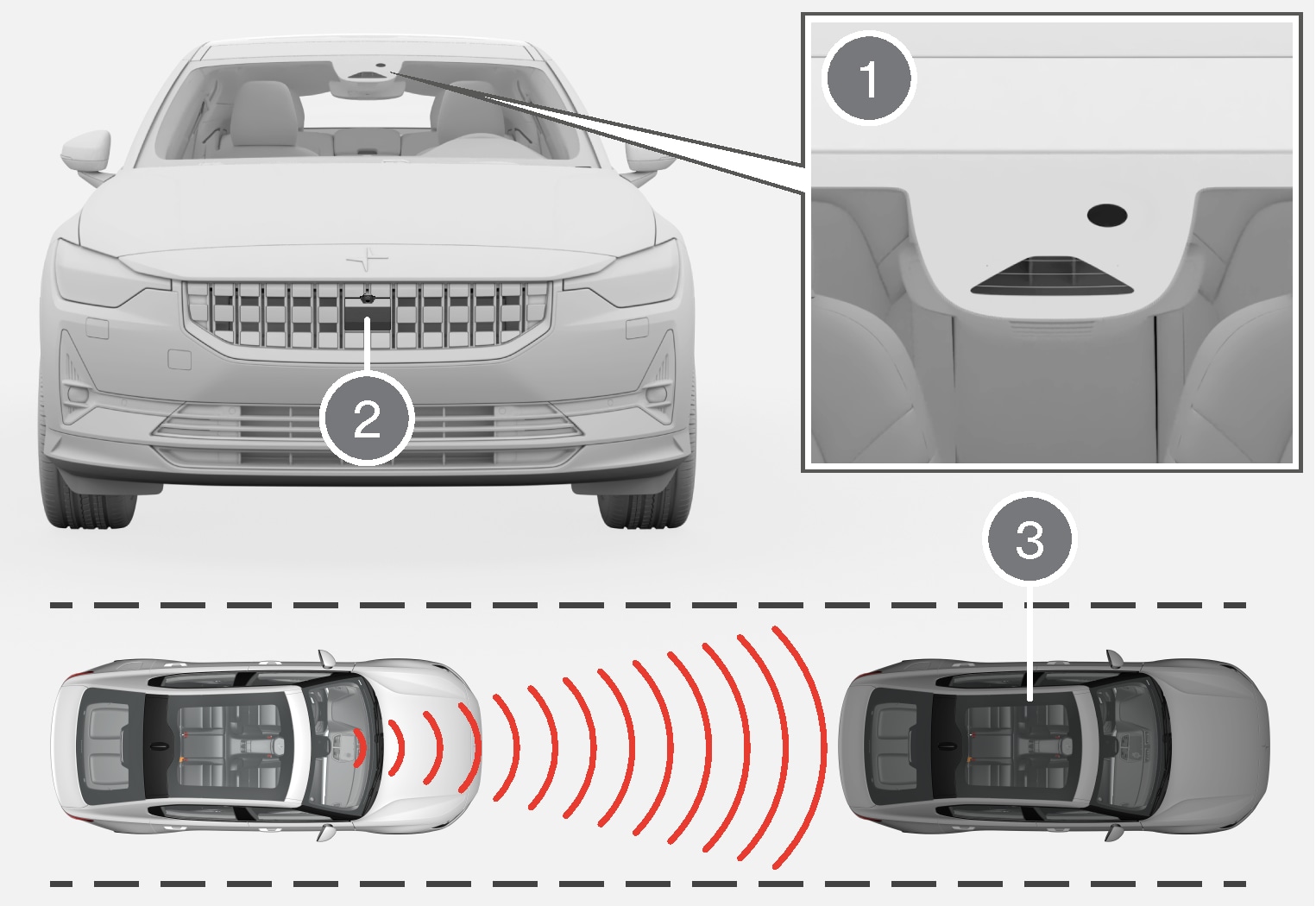
 카메라 유닛
카메라 유닛 레이더 유닛
레이더 유닛 앞차와의 거리 측정
앞차와의 거리 측정
어댑티브 크루즈 컨트롤은 교통이 원활한 고속도로나 곧은 일반도로에서 장시간 운전할 때 편리합니다.
운전자가 원하는 속도 및 앞차와의 시간 간격을 선택합니다. 카메라 및 레이더 유닛이 차량 전방에서 느린 차량을 탐지하는 경우에 속도는 앞차와의 사전 설정된 시간 간격을 통해 자동으로 맞춰집니다. 앞이 트이면 차가 다시 설정 속도로 복귀합니다.
어댑티브 크루즈 컨트롤은 가속 및 제동을 통해 속도를 조절합니다. 브레이크가 속도 조절에 사용될 때 저음을 발생시키는 것은 자연스런 현상입니다.
어댑티브 크루즈 컨트롤의 기능:
- 속도를 매끄럽게 제어하기 위한 것입니다. 앞차와 속도 차이가 크거나 앞차가 급히 속도를 낮추는 등으로 급제동이 필요한 상황에서는 운전자가 직접 브레이크를 걸어야 합니다. 레이더 유닛의 한계로 인해 예상치 못하게 브레이크가 걸리거나 필요할 때 브레이크가 걸리지 않을 수도 있습니다.
- 동일한 차선에 있는 앞차를 운전자가 설정한 시간 간격으로 따릅니다. 레이다 유닛이 앞에서 차를 볼 수 없는 경우에 차량은 운전자가 저장한 속도를 유지합니다. 앞차의 속도가 설정 속도를 초과해도 설정 속도로 주행합니다.
가파른 도로 또는 무거운 하중
어댑티브 크루즈 컨트롤은 주로 평탄한 도로면을 주행할 때 사용하기 위한 것이라는 점을 염두에 두어야 합니다. 가파른 내리막길을 주행할 때에는 이 기능이 앞차와의 올바른 간격을 유지하기 어려울 수도 있습니다. 이러한 경우에는 주의를 기울여야 하며 제동할 준비를 해야 합니다.
차량의 부하가 크거나 차량에 트레일러가 연결된 경우에는 어댑티브 크루즈 컨트롤을 사용하지 마십시오.
경고
- 이것은 충돌 방지 시스템이 아닙니다. 시스템이 앞차를 감지하지 못할 때는 운전자가 직접 차를 제어해야 합니다.
- 이 기능은 사람, 동물, 소형 이동수단(자전거, 오토바이 등)과의 충돌을 방지하기 위해 브레이크를 걸어 주지 못하며 높이가 낮은 트레일러, 마주 오는 차량/물체, 느리게 움직이는 차량/물체, 정지한 차량/물체와의 충돌을 방지하기 위해 브레이크를 걸어 주지도 못합니다.
- 힘든 운전 조건에서 운전할 때(시내에서 운전할 때, 교차로를 통과할 때, 물이나 진흙이 많은 도로에서 운전할 때, 비나 눈이 많이 올 때, 시야 확보가 어려울 때, 굽은 도로에서 운전할 때, 미끄러운 도로에서 운전할 때 등)는 이기능을 사용하지 마십시오.
경고
- 이 기능은 운전을 용이하게 해 주는 운전자 지원 시스템의 하나이지만 교통 상황, 날씨, 도로 상태에 관계 없이 모든 상황에서 기능을 발휘하는 것은 아닙니다.
- 운전자는 시스템을 사용하기 전에 이 기능과 관련된 사용자 설명서의 모든 부분을 읽어 시스템의 한계, 시스템을 사용하기 전에 알아야 할 사항과 같은 요소에 대해 학습할 것을 권장합니다.
- 운전자 지원 기능은 운전자의 주의와 판단을 대체하는 것이 아닙니다. 운전자는 항상 적절한 속도로, 다른 차량과 적절한 간격을 유지하면서, 현행 교통 규칙 및 규정에 따라 차량을 안전하게 운전할 책임이 있습니다.
참고
이 기능은 특정한 한계가 있는 차량 카메라 및 레이더 유닛을 사용합니다.
중요
운전자 지원 시스템 부품의 유지관리는 서비스 센터에서만 수행할 수 있습니다. Polestar 고객 지원(Polestar Customer Support)에 문의하세요.